这个一分钟的视频展示了麻省理工学院传感城市实验室如何使用3D激光扫描来分析巴西贫民窟的建筑。
该项目名为Favelas 4D,使用LiDAR(光探测和测距),这是一种3D激光扫描技术,可以记录巴西最大的贫民窟罗西尼亚附近的详细虚拟地图。
该项目是由建筑师卡洛·拉蒂(Carlo Ratti)领导的麻省理工学院感性城市实验室与里约热内卢城市规划专员华盛顿·法哈多(Washington Fajardo)合作的项目。
罗西尼亚的特点是密集,复杂和分层的结构。因此,传统的卫星地图用途有限,缺乏迷宫般的社区的许多细节。
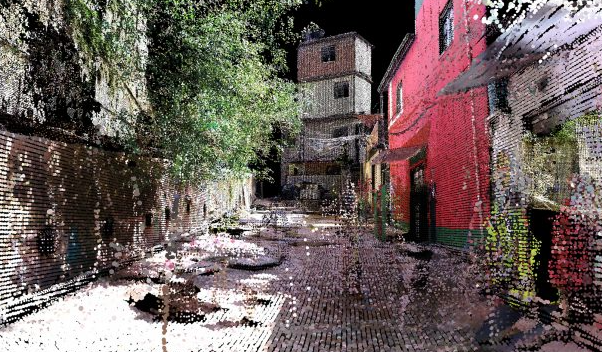
数据点用于创建复杂的分层虚拟环境
相反,该实验室的研究人员使用了手持式LiDAR扫描仪,它使用激光脉冲来测量距离。然后组装这些记录的数据点以创建该区域的3D虚拟地图。
扫描可捕获街道宽度、结构密度、高程和高度等详细信息。扫描还记录了贫民窟的特征性即兴结构,这些结构经常被传统地图遗漏,但它们是社区建筑不可或缺的一部分。
利用这些数据,麻省理工学院和法哈多能够分析罗西尼亚的独特形态,并用它来为城市的社会政策提供信息。
“这些发现可用于制定规划策略,使正式城市对非正式住区更具包容性,或激发对替代建筑方式的研究,以使城市环境更适合和负担得起不断增长的人口,”法哈多说。
这些数据还被用于研究贫民窟的建筑如何融入未来的城市设计。
彩色形状定义了贫民窟的数据集
“尽管环境充满挑战,但贫民窟居民已经开发出巧妙且反应灵敏的方式来建立自己的城市系统,”Ratti指出。
“这种自下而上的规划过程及其产生的复杂建筑形式可能会挑战设计城市的标准方式,”他继续说道。
该实验室以前的项目包括跟踪疾病爆发的污水采样机器人和“空间气泡”,这些气泡将反射太阳光线以应对气候变化。
标签:
版权声明:本文由用户上传,如有侵权请联系删除!